Energy optimal walk of an 8 DOF compliant biped robot
A team of researchers at Indian Institute of Technology Kanpur have designed and experimentally evaluated a new 8-DOF biped robot with compliant shanks .
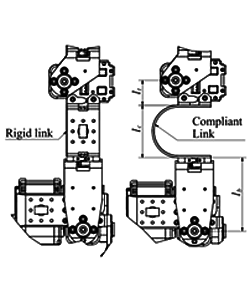
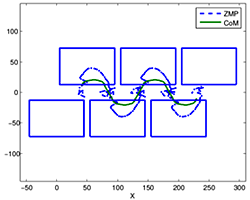
In this work the shanks of an 8 DOF rigid link biped robot are replaced by compliant links that deforms as the robot walks. The Dynamic equations of motion of the biped are derived using the Euler-Lagrange method and the work done for both the rigid and compliant link biped are compared, to study the effect of compliance. By varying the thickness and shape of the compliant link and other gait parameters, various gait trajectories are optimized based on the work done and balance. The designed biped robot was experimentally evaluated for following the optimal gait pattern. The application of this new design would be in soft robots that are safe for interaction with humans. This research was carried out by Abhishek Sharkar (PhD student) and Prof. Ashish Dutta (Professor) in the Department of Mechanical Engineering and has been published in Robotics and Autonomous Systems, 2015.