




beta
|
||||||
 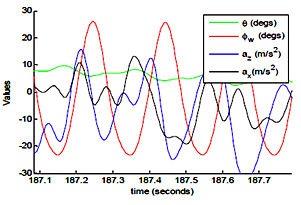 Figure : (a) In flight filtered pitch angle, wing position and accelerations raw data from IMU for the ornithopter Cleo acquired at 200 Hz
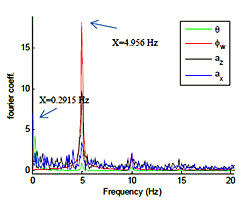 Figure : (b) Fourier coefficients of pitch angle, wing position acceleration. Here flapping frequency is 4.956Hz and pitching heaving oscillations are strongly correlated to this frequency. X=0.2915Hz is the phugoid or long period frequency during flight.
|
The project aims to build an autonomous 1.5 m wing span flying bird which will carry a small camera as the payload and will be able to record pictures for surveillance applications. Two other flying models have been constructed of wind span 1.6m with very distinct mechanisms and weight. The use of polythene wing membrane with density 40gm/m2 has proved to deliver superior performance.
Technical Results Obtained: Flapping wing vehicle:
Autonomous flight test carried out on this model for loiter mode:
|
|||||



