
















- Admissions 2026-27 Semester-I Announcements New
- Admission Notice under Joint PhD with University of Melbourne in Quantum communications New
- IIT Kanpur Certificate Program on PYTHON for Artificial Intelligence Machine Learning and Deep Learning, 15th June to 15th July 2026 New
- Applied Data Science & Machine Intelligence: Fundamentals to Next Generation AI: 1st June to 15th July 2026 New
- IIT Kanpur Certificate Program on Python QISKIT for Data Science, Data Analytics, Machine Learning (ML) and Quantum Computing, 1st March to 27th March 2026 New
- Notice for Spot PhD Admissions
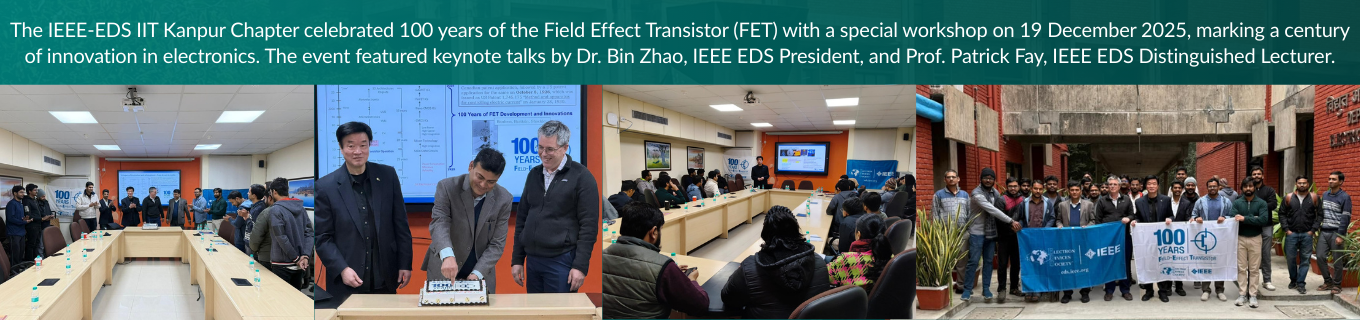
- The IEEE DEIS Summer School 2025 on the theme of 'Insulating and Multifunctional Dielectrics' was hosted for the first time in India, at IIT Kanpur, from 20th to 25th September.
- IIT KANPUR Certificate Program on PYTHON + MATLAB/ OCTAVE-Based Simulation and Design of 5G/ 6G Wireless Technologies, 1st September to 26th September 2025
- Dr. Meena Mishra, DRDO graced us as the Guest of Honour for the 58th Convocation.
- Farewell to the class of 2025 organized by EEA on 22nd April 2025
- Workshop on "Metamaterial Antennas and Applications" was successfully conducted from April 18-20 2025, coordinated by Prof. Raghvendra Kumar Chaudhary and Prof. Kumar Vaibhav Srivastava
- Invited Lecture by Prof. Akhilesh Jaiswal (University of Wisconsin-Madison, USA) titled "Unconventional Computing Paradigms from Extreme-Edge to Extreme-Scale" was successfully conducted on 15th April 2025
- EMI/EMC (Electromagnetic Interference and Compatibility) and Electrical Safety Test Facility, accredited by National Accreditation for Testing and Calibration Laboratories (NABL) was launched on 5 April, 2025 at IIT Kanpur under the leadership of Prof. M. Jaleel Akhtar
- Happy Hours for UG students organized by EEA on 24th March 2025
- Invited Lecture by Prof. Souvik Mahapatra (IIT Bombay) titled “A Device (TCAD) to Circuit (SPICE) Framework for BTI and HCD Aging” was successfully conducted on 24th February 2025
- Lecture by Prof. Saurabh Lodha (IIT Bombay) titled “Engineering the strain and neuromorphic performance of 2D-TMD transistors” was successfully conducted on 25th February 2025
- Invited Lecture by Mr. Milind Dhighrasker, Senior Director, ON Semiconductors titled “Overview of Design Challenges for SiC-based Traction Inverters” on 31st January 2025
- Invited Lecture by Prof. William G. Whittow, Wolfson School of Mechanical, Electrical and Manufacturing Engineering (WSMEME) at Loughborough University titled “Recent Advances in Reconfigurable RF Frontend Systems” was successfully conducted on 6th January 2025
- Bonfire Evening - Relive the Joys of College Days organized by EEA on 4th January 2025
- Invited Lecture by Prof. Srabanti Chowdhury (Stanford university) titled “Unleashing the Potential of Wideband Gap Materials” was successfully conducted on 2nd January 2025
Admissions 2026-27 Semester-I Announcements Read More...
 Welcome to the Department of Electrical Engineering (EE) at IIT Kanpur. The EE department is one of the oldest departments at IIT Kanpur. It was one of the first five departments with which IIT Kanpur started in 1960. Subsequently, the Advanced Centre for Electronics Systems (ACES) came into existence in early 1970 by a grant from the Ministry of Defence to undertake manpower training and to carry out research and development related to defense. Subsequently, several sponsored projects in many subject areas with large interdisciplinary content were handled through ACES. ACES is now an integral part of the EE department and houses the majority of EE laboratories and facilities. The department is currently the largest multidisciplinary department at IIT Kanpur. It covers practically all sub-disciplines in Electrical and Communication Engineering including Power Systems, Power Electronics, Microwaves, RF techniques, Microelectronics, VLSI, Photonics, Control Systems, Robotics, Speech, and Audio Processing, Computer Vision, Artificial Intelligence, Machine Learning, Wireless Communication, Computer Networks, Future wireless networks like 5G/6G, Wireless sensor networks, and IoT networks. Read more
Welcome to the Department of Electrical Engineering (EE) at IIT Kanpur. The EE department is one of the oldest departments at IIT Kanpur. It was one of the first five departments with which IIT Kanpur started in 1960. Subsequently, the Advanced Centre for Electronics Systems (ACES) came into existence in early 1970 by a grant from the Ministry of Defence to undertake manpower training and to carry out research and development related to defense. Subsequently, several sponsored projects in many subject areas with large interdisciplinary content were handled through ACES. ACES is now an integral part of the EE department and houses the majority of EE laboratories and facilities. The department is currently the largest multidisciplinary department at IIT Kanpur. It covers practically all sub-disciplines in Electrical and Communication Engineering including Power Systems, Power Electronics, Microwaves, RF techniques, Microelectronics, VLSI, Photonics, Control Systems, Robotics, Speech, and Audio Processing, Computer Vision, Artificial Intelligence, Machine Learning, Wireless Communication, Computer Networks, Future wireless networks like 5G/6G, Wireless sensor networks, and IoT networks. Read more

Welcome to the Power and Control Group in the Department of Electrical Engineering IIT Kanpur. The stream offers M.Tech., dual-degree and PhD programs. The stream has always aimed at imparting technical education and equip the students with the latest technologies.
The research interests of the faculty members include application based areas like Intelligent Control, Quantum Learning System, Cognitive Modeling, Soft Computing. Power system dy namics and stability, state estimation, use of synchronized measurement technology in power systems, Electric Drives, Electrical machines, Microprocessor Systems and instrumentation. Digital systems, Microprocessor based systems. Multiphase DC/DC Power Conversion, Power Management Circuits, Modeling and Control of Power Electronics Systems. Power system dynamics and voltage stability studies, Wide Area Monitoring, Optimal power dispatch and state estimation, Security analysis and control, Energy management system and distribution automation, Power system restructuring. Machine Learning, Biometrics, GMM, HMM, Fuzzy Systems, Clustering Algorithms, Coloe Segmentaion, Video Image sequence recognition. Several ongoing projects are coordinated by the faculty along with active participation of the students, which are being funded by various Government and private agencies. The research interest of the High Voltage Laboratory broadly includes fundamental and application research into electrical insulation for power system and apparatus, and insulation diagnostics. Specific areas of research interest include nano-dielectrics, space charge diagnostics, electrical treeing, tracking, partial and plasma discharges.
Research

- Study of electric tree growth in polymeric dielectrics with and without voids, 200
- Dielectric behaviour of epoxy-based composites with nano-sized metal-oxide fillers, 2009
- Kinetic modelling of gas discharges in narrow dielectric channels: applications to partial discharges and plasma thrusters, 2009
- Polarization and conduction mechanisms in epoxy-based nano-dielectrics, 2013
- Space charge mechanisms in polymer composite dielectrics, 2013
- Space Charge diagnostics in epoxy based nano-dielectrics (ongoing)
- Dielectric response and energy storage in epoxy nano composites (ongoing)
- Electric stress control and permittivity in functionally graded dielectrics (ongoing)
- Impulse Generator, 4.4 kJ, 500 kV, 4 stage
- High Voltage Power Frequency AC Test Transformer, 100kVA, 150 kVA
- Portable AC Break down Tester
- High Voltage DC Generator, 400 kV either polarity
- Single Phase Power Quality Analyzer
- Artificial rain making equipment
- Sphere gap assembly
- Programmable Electro meter
- PD Detector and Analyzer, Measuring PD Range - 0-50000 pC
- High Voltage Schering Bridge with Null Indicator and Guard ring Capacitor
- Insulation Tester
- Digital Earth Clamp meter, Measuring range: 0.01- 300 ohm
- Digital Earth Tester, Measuring range - 0.01 - 200 ohm
- Programmable resistance/Resistivity meter
- High Speed Camera (basler 302B)
- Experimental investigation into the mechanism of electrical treeing in high voltage cable insulation, MHRD (R&D)
- Theoretical and experimental investigation into an artificial tree channel in high voltage polymeric insulation, DST-SERC
- Modelling of the gaseous discharge in Stationary Plasma Thrusters, ISRO
- Electrical characterization of nano-composites for use as novel dielectrics, DST-SERC
- Investigation of space charge phenomena in polymeric dielectric materials, DST-SERC
- Experimental characterization and numerical investigation of charge transport in synthetic polymers used for electrical insulation under high and low voltages, DST: Indo-Tunisian Programme of Cooperation in the fields of Science and Technology
- Analysis, fabrication and testing of a dielectric elastomer based energy harvesting system, DST-SERB
Journal
- Charge trapping and transport phenomenon in aged and unaged epoxy resin and polyethylene,Supriyo Das and Nandini Gupta, International Transactions on Electrical Energy Systems, Volume 25, Issue 6, June 2015, Pages: 948–957.
- Effect of ageing on space charge distribution in homogeneous and composite dielectrics, Das, S. and Gupta, N., IEEE Transactions on Dielectrics and Electrical Insulation, v 22, n 1, p 541-7, Feb. 2015 .
- Interfacial charge behaviour at dielectric - dielectric interfaces, Das, S. (Dept. of Electr. Eng., Indian Inst. of Technol. Kanpur, Kanpur, India); Gupta, N., IEEE Transactions on Dielectrics and Electrical Insulation, v 21, n 3, p 1302-11, June 2014.
- Effect of humidity on the complex permittivity of epoxy-based nanodielectrics with metal oxide fillers, Patel, R.R. and Gupta, N., International Transactions on Electrical Energy Systems, v 23, n 6, p 846-52, Sept. 2013
- A quantitative method for characterizing dispersion in nanocomposites, R R patel, N Gupta and S Basu, Journal of nanostructures polemrs and composites, V9, n 3, 2013, pp 108-113.
Conferences
- Assessment of space charge based on PEA measurement
Das, S and Gupta, N. Source: 2015 1st Conference on Power, Dielectric and Energy Management at NERIST (ICPDEN). Proceedings, p 4 pp., Jan. 2015 - Space charge estimation in epoxy-based nanodielectrics using complementary techniques
Pandey, J.C. and Gupta, N. Source: 2015 IEEE Conference on Electrical Insulation and Dielectric Phenomena (CEIDP), p 499-502, 2015 - Tracking and surface degradation of barium titanate filled silicone rubber nanocomposites
Kumar, R. and Gupta, N. Source: 2015 IEEE Conference on Electrical Insulation and Dielectric Phenomena (CEIDP), p 495-8, 2015 - Functionally graded material composites for effective stress control in insulators
Qasim, S.A and Gupta, N. Source: 2015 IEEE 11th International Conference on the Properties and Applications of Dielectric Materials (ICPADM), p 232-5, 2015 - Epoxy based high permittivity nanodielectrics for electric stress mitigation
Zafar, R. and Gupta, N. Source: 2015 Electrical Insulation Conference (EIC), p 614-17, 2015 - Thermal aging assessment of epoxy-based nanocomposites by space charge and conduction current measurements
Pandey, J.C. and Gupta, N. Source: 2014 IEEE Electrical Insulation Conference (EIC), p 59-63, June 2014 - Effect of thermal and humidity ageing on space charge accumulation in epoxy resin
Das, S. and Gupta, N. Source: 2013 IEEE International Conference on Solid Dielectrics (ICSD), p 456-9, 2013 - Space chargediagnostics in aged polymeric insulation
Das, S. , Pandey, J.C.; Gupta, N. Source: 2013 IEEE 1st International Conference on Condition Assessment Techniques in Electrical Systems (CATCON), p 395-8, 2013 - Space charge characteristics of thermally aged epoxy based nanocomposite
Pandey, J.C. (Dept. of Electr. Eng., Indian Inst. of Technol. Kanpur, Kanpur, India); Gupta, N. Source: 2013 IEEE Conference on Electrical Insulation and Dielectric Phenomena (CEIDP 2013), p 707-10, 2013 - Space charge accumulation in epoxy resin and polyethylene
Das, S. and Gupta, N. Source: 2012 IEEE 10th International Conference on the Properties and Applications of Dielectric Materials (ICPADM), p 4 pp., 2012.
- Syed Abdullah Qasim
- Romana Zafar
- Jeewan C. Pandey
- Supriyo Das
- Ritesh R. Patel
- Parimal Maity (Completed)
- Alireza Ashrof Ganjovi (Completed)
- Elanseralathan kasinathan (Completed)
- Harish Chakerwarti (Completed)
- Udaykiran Kasimala (Completed)
- V. Vijaykumar (Completed)
- Swati Gupta (Completed)
- Chiranjeevi Gutlapalli (Completed)
- S R Naga Rajesh Gudivada (Completed)
- Shreya Ghatak (Completed)
- Satbir Singh (Completed)
- Lekhraj Singh
Lekhraj Singh
Email: This email address is being protected from spambots. You need JavaScript enabled to view it.
Phone: +91-512-259-7850
Location: WL 114 A

- Frequency Response Analyzer(Make: Solartron, Bandwidth: 0.1Hz – 1MHz).
- Digital Oscilloscope (Make: YOKOGAWA, 1GegaSamples/sec, 500MHz, 4-channel).
- Programmable automatic RLC Meter (Make: FLLIKE , DC-1MHz).
- Manual winding machine.
- Differential Probe (Make: HAMEG Instruments, max 1500V peak).
- Current Probe (Make: HAMEG Instruments, 20A rms).
- High Precision Current Measurement Instrument(Make: Techtronix, DC-100MHz, with current probe, with amplifier).
- 3-phase Inverter (Make: SEMIKRON, 20kVA, Vdc=400V, 220V rms, 50 Hz).
- Analog Rework Station (Make: Signetic).
- FPGA Controller platform(ALTERA Cyclone-2 processor).
- DSP Controller platform(Texas Instruments processor).
- JTAG Emulator (Make: Spectrum Digital).
- Matrix Converter (3-phase, 6kVA, 230V, 11A).
- Current Source Inverter/Buck Rectifier (1-phase, 1.2kW, 220V rms, 100V dc).
- Department of IT, Govt. of India through nodal agency CDAC Trivandrum, “Universal Front-End for Micro Generators Using Renewable Sources”: completed
- BHEL, Bhopal, “Establishment of new measuring system for determination of Volt-Ampere (V-I) characteristics of shunt reactors”: completed
- Department of Science & Technology, Govt. of India, “A 1 MW Re-synchronizable Autonomous Grid: DC-AC Inverters & Grid Side Paralleling”: completed
- Electrohms Private Limited, “Linearity improvement of high current Hall effect current sensors”: completed
- Department of Biotechnology, Govt. of India, “Development of MRI compatible nerve stimulator to understand the underlying mechanism in neuro modulation”: completed
- Department of Science &Technology, Indo-UK project on “Reconfigurable Distribution Networks”: ongoing
- NTPC-NETRA, “Design & Development of Intelligent Electronic Transformer”: ongoing
- Anindya Dasgupta
- Poonam Chaudhary
- Kalyan Yenduri
- Sridhar Joshi
- Sanjay Tolani
- Vasav Gautam
- Shiladri Chakraborty
- Anindya Chitta Bagchi
- Khyatiben Gohil
- Rajat Bishnoi
- Siddhartha Gupta
- Kalyan Yenduri, Parthasarathi Sensarma, “Maximum Power Point Tracking of Variable Speed Wind Turbines With Flexible Shaft”, IEEE Transactions on Sustainable Energy, doi: 10.1109/TSTE.2015.2510422, 2016
- Utsab Kundu, Parthasarathi Sensarma, “Gain-Relationship-Based Automatic Resonant Frequency Tracking in Parallel LLC Converter”, IEEE Transactions on Industrial Electronics, vol.63, no.2, pp.874-883, Feb. 2016.
- Utsab Kundu, Shiladri Chakraborty, Parthasarathi Sensarma, “Automatic Resonant Frequency Tracking in Parallel LLC boost dc-dc converter”, IEEE Transactions on Power Electronics, vol.30, no.7, pp.3925-3933, Jul. 2015.
- Poonam Chaudhary, Suvendu Samanta, Parthasarathi Sensarma, “Input-Series-Output-Parallel Connected Buck-Rectifier for High-Voltage Applications”, IEEE Transactions on Industrial Electronics, vol.62, no.1, pp.193-202, Jan. 2015.
- Anindya Dasgupta, Parthasarathi Sensarma, “Filter Design of Direct Matrix Converter for Synchronous Applications”, IEEE Transactions on Industrial Electronics, vol.61, no.12, pp.6483-6493, Dec. 2014.
- Poonam Chaudhary, Parthasarathi Sensarma, "Front-End Buck Rectifier With Reduced Filter Size and Single-Loop Control," IEEE Transactions on Industrial Electronics, vol.60, no.10, pp.4359-4368, Oct. 2013.
- Anindya Dasgupta, Parthasarathi Sensarma, “Low frequency dynamic modeling and control of Matrix Converter for power system applications”, Power Electronics IET, vol.5, no.3, pp 304-314, March 2012
- Rakesh Kumar Sinha, Parthasarathi Sensarma, “A pre-filter based PLL for three-phase grid connected applications”, Electric Power systems Research, vol 81, Issue 1, pp 129-137, January 2011.
- Shahil Shah, Parthasarathi Sensarma, “Three Degree of Freedom Robust Voltage Controller for Instantaneous Current Sharing Among Voltage Source Inverters in Parallel”, IEEE Transactions on Power Electronics , vol.25, no.12, pp.3003-3014, December 2010.
- Samir Hazra, Parthasarathi Sensarma, “Self-excitation and control of an induction generator in a stand-alone wind energy conversion system”, Renewable Power Generation, IET , vol.4, no.4, pp.383-393, July 2010
- Anindya Dasgupta, Parthasarathi Sensarma, "Low frequency dynamic modeling and control of Matrix converter for power system applications" in IET Power Electronics ,2011
- Samir Hazra, Parthasarathi Sensarma, "Vector approach for self-excitation and control of induction machine in stand-alone wind power generation", in IET Renewable Power Generation, vol.5, no.5,pp.397-405, September 2011
- Rakesh Kumar Sinha, Partha Sarathi Sensarma "A pre-filter based PLL for three-phase grid connected applications", in Electric Power systems Research , January 2011, Vol 81, Issue 1, pp 129-137
- Shahil Shah, ParthaSarathi Sensarma, "Three Degree of Freedom Robust Voltage Controller for Instantaneous Current Sharing Among Voltage Source Inverters in Parallel " in IEEE Transactions on Power Electronics , December 2010, Vol 25, Number 12, pp 3003-3014
- Samir Hazra, Parthasarathi Sensarma, "Self Excitation and Control of an Induction Generator in a Stand-Alone Wind Energy Conversion System ", in IET - Renewable Power Generation, July 2010, Vol 4, Issue 4, pp 383-393
- Surendra Kumar S, ParthaSarathi Sensarma, "An Multiband Shunt Hybrid Active Filter with Reduced Sensor Count", Sadhana, in Springer, Vol.38, No. 5, October 2008, pp 629-642.
- Surendra Kumar S, ParthaSarathi Sensarma, "A Multiband Shunt Hybrid Active Filter with Sensorless Control", in Journal of Power Electronics, Vol. 8, No. 4, October 2008, pp. 317-324. (ISSN 1598-2092)
- A. Dasgupta, P. Sensarma, " An integrated filter and controller design for direct matrix converter", at IEEE-ECCE 2011, Phoenix, USA. September 2011
- S. Shah, P. Sensarma, "Robust PI controller for multi-purpose voltage controlled VSI",at Emobility - Electrical Power Train, 2010, Leipzig, Germany
- P. Chaudhary, A. Agarwal, P. Sensarma, "Stability analysis of input-series output-parallel connected buck rectifiers" , at Emobility - Electrical Power Train, 2010, Leipzig, Germany
- Samir Hazra, P. Sensarma, "DC Bus Voltage Build up and Control in Stand-alone Wind Energy Conversion System Using Direct Vector Control of SCIM", at IEEE-IECON 08, Orlando, Florida, USA
- N V Suresh Kumar Srighakollapu, P. Sensarma, "Sensorless Maximum Power Point Tracking Control in Wind Energy Generation using Permanent Magnet Synchronous Generator ", at IEEE-IECON 08, Orlando,Florida, USA
- S Surendra Kumar, P. Sensarma, "A Multiband Shunt Hybrid Active Filter With Sensorless Control" at National Power Electronics Conference (NPEC 07), Bangalore.
- Anindya Dasgupta, Praveen Tripathy, P. Sensarma, "Matrix Converter as UPFC for Transmission Line Compensation" at ICPE 2007, Daegu, Korea
- S Surendra Kumar, P. Sensarma, " A Multiband Shunt Hybrid Active Filter With Sensorless Control", at ICPE 2007, Daegu, Korea.
- Rakesh Kumar Sinha, P. Sensarma, "Improved PLL Under Distorted Utility Conditions", at IEEE-ICIT 2006, Mumbai.
- Ravikanth Bachana, P. Sensarma, "Improvement of Current Dynamics During Controller Saturation in a STATCOM", atIEEE-ICIT 2006, Mumbai.
- D. D. Praveen Kumar, S. Tiwari, M. Borage, S. Kotaiah, P.Sensarma, "Full Bridge Zero-Voltage-Switching Converter Topology with Wide-Conversion-Range Applications", at National Power Electronics Conference, NPEC-2005, Kharagpur
- Kingshuk Kr. Das, P. Sensarma, "A Novel Approach to Harmonic Compensation in Power Systems Using Series Connection of Parallel Resonant Circuit and Active Filter", at National Power Electronics Conference, NPEC-2005, Kharagpur.
- M. Dighrasker, P. Sensarma, " Current Controlled Voltage Source Inverter Under Saturation - Analysis and New Algorithms", at IASTED Conference on Applied Simulation and Modeling, Benalmadena, Spain, 2005 .
- P. Bajpai, S. Yadav, P. Sensarma, "The Instantaneous Reactive Power Approach for Harmonic Extraction - Pitfalls and Safeguards", at National Power Electronics Conference, NPEC-2003, Mumbai.
- 55 kVA back-to-back solar PV inverter module with 96% efficiency, 100% overload capability, 55oC ambient capable, IP64; paralleling control with equal transient current sharing
- 3x10 kW grid-connected solar PV inverter with integrated protection, current control and Maximum Power Point Tracking. Unit operational at WBREDA, Kolkata, since February 2010.
- High bandwidth, low-distortion isolated voltage transducer. Technology licensed to Electrohms Private Limited, Bangalore.
- Inductance measurement of transmission line compensation reactors. Complete software and knowhow transferred to BHEL Bhopal.
- MRI (3 Tesla) compatible neural stimulator for investigations in neuroscience. First working prototype successfully tested in Fortis Hospital, Gurgaon.
- Hybrid active filter for distribution line harmonic compensation.
- Patent: Power Extraction From Photovolatic Power Sources
Application No. :1769/DEL/2011
Dated 22.06.2011
Inventor: Parthasarathi Sensarma, Vasav Gautam - Patent: Power Extraction from Direct Current Power Source
Application No. :512/DEL/2011
Dated 24.02.2011
Inventor: Parthasarathi Sensarma, Vasav Gautam - Patent: Improved Single-Phase Phase Locked Loop
Application No. :349/DEL/2007
Dated 20.02.2007
Inventor: Parthasarathi Sensarma, Rakesh K Sinha
- A. P. Bajpai, In-charge
- Satyendra Kumar.
- Brijendra Sharma
- Shri Nandkishor.
Dr. Parthasarathi Sensarma.
Email: This email address is being protected from spambots. You need JavaScript enabled to view it.
Phone: +91 512 259 7076 (O)/ 7822 (L)/ 8612 (R)
Research

- Practical applications of control system theory that will have significant positive impact on India and mankind
- Motion control of a four-wheel independent-steering four-wheel independent-drive electric vehicle
- Yokogawa DSO with CAN analyzer software
- ezDSP kits (F2808 and F2812)
- 8051 microcontrollers, dsPIC microcontrollers
- USB-CAN converters
- Lonworks' miniEVK
- EZDSK91C111 Ethernet network daughter boards for ezDSP kits
- PMDC motor control kits developed in-house
- Developed a digital automatic voltage regulator for BHEL Bhopal, jointly with Dr. P. Sensarma of the EE department, IITK (2007-2010)
- Developed a new Control systems Laboratory for EE department IIT Kanpur (2009)
- Developed feedback control strategies for coordination of the 10 motors that drive and steer ISRO's Moon Rover (2009-2015)
- Developed a path-tracking control strategy for a four-wheel independent-steering four-wheel-drive electric vehicle (Funded by DST SERC, 2012-2016)
- Ramprasad Potluri, Pushpak Bhole, and Abhishek Verma. "Disturbance Observer for Speed-Dependent Disturbance in Motor Control". Indian Control Conference. IEEE. IIT Madras, Chennai, India. January 2015.
- Manavaalan Gunasekaran, Ramprasad Potluri, and Ashish Dutta. "Path Tracking Control of a Moon Rover". Indian Control Conference. IEEE. IIT Madras, Chennai, India. January 2015.
- Ramprasad Potluri and Arun Kant Singh. "Path-Tracking Control of an Autonomous 4WS4WD Electric Vehicle Using its Natural Feedback Loops". IEEE Transactions on Control Systems Technology, Vol 23, Number 5, September 2015.
- Arun Kant Singh and Ramprasad Potluri. "Comments on “Model-Independent Adaptive Fault-Tolerant Output Tracking Control of 4WS4WD Road Vehicles”." IEEE Transactions on Intelligent Transportation Systems, Vol 16, Number 3, June 2015.
- Manavalan Gunasekaran and Ramprasad Potluri, "Low-Cost Undergraduate Control Systems Experiments Using Microcontroller-Based Control of DC Motor." IEEE Transactions on Education, Vol 55, issue 4, pp 508-516, November 2012.
- Potluri, Ramprasad; Singh, Arun Kant, "Path-Tracking Control of an Autonomous 4WS4WD Electric Vehicle Using its Natural Feedback Loops," 2013 IEEE Multi-Conference on Systems and Control (MSC 2013), Hyderabad, India. 28 - 30 August 2013.
- Saurav, Kumar; Potluri, Ramprasad, "Sensorless speed control of a permanent magnet DC motor by compensating the plant nonlinearities," 2013 IEEE International Symposium on Industrial Electronics (ISIE), pp.1 - 4. Taipei, Taiwan. 28-31 May 2013.
- Manavaalan Gunasekaran and Ramprasad Potluri. "Kinematics Modeling and Design of Motion Controller for a Moon Rover," 11th International Symposium on Advanced Vehicle Control (AVEC'12). Sept. 9 - 12, 2012, Seoul, Korea.
- Ramprasad Potluri and Arun Kant Singh. "Path-tracking control of an autonomous 4WS4WD electric vehicle using driving motors' dynamics," 7th IEEE International Conference on Industrial and Information Systems (ICIIS), 2012, pp.1-6, 6-9 Aug. 2012, IIT Madras, Chennai, India.
- Ramprasad Potluri. Comments on “Chattering Free Robust Control for Nonlinear Systems.” IEEE Transactions on Control Systems Technology, Vol. 20, Issue 2, pp. 562 -- 562, March 2012
- Ramprasad Potluri. Comments on “Optimal Fault-Tolerant Path-Tracking Control for 4WS4WD Electric Vehicles”. IEEE Transactions on Intelligent Transportation Systems, Volume: 12, Issue: 2, 2011, Page(s): 622 - 623.
- Manavaalan Gunasekaran and Ramprasad Potluri. Cooperative control of a dual-motor ball and beam system. INDICON 2008. IEEE, 2008.
- Ramprasad Potluri, et al. Networked Control Systems and a Mixed Open-Loop/Closed-Loop Control. Advances in Control and Optimization of Dynamical Systems (ACODS), IISc, Bangalore, India, February 2007
- Manavaalan Gunasekaran (Graduated in May 2015)
Thesis Title: Path tracking control of a Moon rover: modeling, design, and implementation - Arun Kant Singh
- Arunava Karmakar
- Dileep Kumar
Ramprasad Potluri
Telephone: +91-512-2597735
Email: This email address is being protected from spambots. You need JavaScript enabled to view it.
Location: Western Labs 217 B
Research

- Multiphase DC/DC Power Conversion
- Power Management Circuits
- Modeling and Control of Power Electronics Systems
- Variable Phase Input Power Plant Design for Telecom Application
Funding Agency: Bharat Sanchar Nigam Ltd. (BSNL)
Duration: December 2008-December 2009
Status: Active - Dynamic Modulators for Large-Signal Linearization of Boost Converters
Funding Agency: R and D Department
IIT Kanpur
Duration: September 2008-December 2009
Status: Completed
JOURNALS:
- Santanu Mishra and Xingsheng Zhou, “Design consideration for a low voltage high current voltage regulator modulator system,” in IEEE Tran. On Ind. Electronics, pp. 1330-1338, April 2011.
- Santanu Mishra, Kapil Jha, and Khai D. T. Ngo, “Dynamic Linearizing Modulator for Large-signal Linearization of a Boost Converter,” in IEEE Tran. On Power Electronics, vol. 26, pp. 3046-3054, Oct. 2011.
- Saurabh Upadhyay, Santanu Mishra, and Avinash Joshi, “A Wide Bandwidth Electronic Load,” in IEEE Tran. On Ind. Electronics, vol. 59, pp. 733-739, Feb 2012.
- Santanu Mishra, Ravindranath Adda, and Avinash Joshi, “Inverse Watkins-Johnson Topology based Inverter,” in IEEE Tran. On Power Electronics, Vol. 27, pp.1066-1070, March 2012.
- Rajeev Singh and Santanu Mishra “A Magnetically Coupled Feedback-Clamped Optimal Bidirectional Battery Charger,” in IEEE Tran. On Industrial Electronics, Vol. 60, pp. 422 – 432, Feb. 2013.
- Ravindranath Adda, Olive Ray, Santanu Mishra, and Avinash Joshi, “Synchronous Reference Frame Based Control of Switched Boost Inverter for Standalone DC Nanogrid Applications,” in IEEE Tran. On Power Electronics, Vol. 28, pp. 1219 – 1233, Mar. 2013.
- Rajeev Singh and Santanu Mishra “Synthetic Ripple Based Digital Hysteretic Modulator for Point-ofLoad Converters,” in IEEE Trans. On Ind. Electronics, Vol.60, pp. 4996 – 5007, Nov. 2013.
- Ravindranath Adda, Santanu Mishra, and Avinash Joshi, “Analysis and PWM Control of Switched Boost Inverter,” in IEEE Trans. On Ind. Electronics, Vol. 60, pp. 5593 - 5602, Nov. 2013.
- Olive Ray and Santanu Mishra, “Boost-Derived Hybrid Converter with simultaneous DC and AC outputs,” in IEEE Trans. On Industry Applications, Vol. 50, No. 2, pp. 1082-1093, Mar./Apr. 2014.
- Soumya S. Nag and Santanu Mishra, “Current-fed Switched Inverter,” in IEEE Tran. On Industrial Electronics, Vol. 61, No. 9, pp. 4680-4690, Sept. 2014.
- Olive Ray, Anil Prasad, Santanu Mishra, and Avinash Joshi, “Integrated Dual Output Converter,” accepted for publication in IEEE Trans. On Ind. Electronics, March 2014.
- Kapil Jha, Santanu Mishra, and Avinash Joshi, “High-Quality Sine Wave Generation Using a Differential Boost Inverter at Higher Operating Frequency,” accepted in IEEE Trans. On Industry Applications, May 2014.
- Kapil Jha, Santanu Mishra, and Avinash Joshi, “Boost Amplifier based Power-Hardware-in-the-Loop Simulator,” accepted in IEEE Tran. On Industrial Electronics, May 2015.
CONFERENCE:
- Santanu Mishra, “Dynamic Modeling of a hysteretic modulator,” in IEEE International Symposium on Industrial Electronics (ISIE), Bari Italy, pp. 798-802, July 2010.
- Kapil Jha and Santanu Mishra, “Large signal linearization of boost converter,” in IEEE-Energy Conversion Congress and Exposition (ECCE 10), Atlanta, GA, pp. 4140-4144, Sept. 2010.
- Saurabh Upadhyay, Ravindranath Adda, Santanu Mishra, and Avinash Joshi, “A Switched-Boost Topology for Renewable Power Application,” in IEEE-International Power Engineering Conference (IPEC), Singapore, pp. 758-762, Oct. 2010.
- Saurabh Upadhyay, Ravindranath Adda, Santanu Mishra, and Avinash Joshi, “Derivation and Characterization of Switched-Boost Inverter,” in IEEE-14th European Conference on Power Electronics and Applications - EPE 2011, Birmingham, pp. 1-10. Aug. 2011.
- Rajeev Singh and Santanu Mishra, “A Modified Average Current-Mode Controller for Converter-Based Optimal Battery Charging,” in IEEE- Vehicle Power and Propulsion Conference (VPPC), Chicago, IL, pp.1-6,Sep-2011.
- Rajeev Singh and Santanu Mishra, “A Novel Feedback-Clamped Magnetically Coupled BiDirectional Optimal Battery Charging System,” in IEEE-ECCE 2011, Phoenix, pp. 1202-1209, Sept. 2011.
- Santanu Mishra, Ravindranath Adda, and Avinash Joshi, “Switched-boost Inverter based on Inverse Watkins-Johnson Topology,” in IEEE-ECCE 2011, Phoenix, pp. 4208-4211, Sept. 2011.
- Ravindranath Adda, Santanu Mishra and Avinash Joshi, “A PWM Control Strategy for SwitchedBoost Inverter,” in IEEE-ECCE 2011, Phoenix, pp. 991-996, Sept. 2011.
- Rajeev Singh and Santanu Mishra, “A Feedback-Clamped Average Current Mode Controller Based Universal and Adaptive Optimal Battery Charging System,” Indian Institute of Sciences Centenary Conference, 2011-Electrical Engineering (CCEE), pp. 101-106, Dec.2011.
- Kapil Jha and Santanu Mishra, “Large-signal Linearization of a Boost Converter using The Dynamic Linearizing Modulator,” Indian Institute of Sciences Centenary Conference, 2011- Electrical Engineering (CCEE), pp. 107-112, Dec.2011.
- Rajeev Singh and Santanu Mishra, “A Versatile Control Modulator for Optimal Bi-directional Battery Charging,” in IEEE Power Electronics, Machines and Drives Conference (PEMD 2012), 29 March 2012, pp.1-5, University of Bristol, UK.
- Rajeev Singh, Makarand Mijar, Ankur Mishra, and Santanu Mishra, “Digital Synthetic Ripple Modulator for Point-of-Load Converters,” in IEEE Power Electronics, Machines and Drives Conference (PEMD 2012), 29 March 2012, pp.1-5, University of Bristol, UK.
- Kapil Jha and Santanu Mishra, “Dynamic Analysis of a Linearizing Modulator for a Boost Converter,” in IEEE Power Electronics, Machines and Drives Conference (PEMD 2012), 29 March 2012, pp.1-5, University of Bristol, UK.
- Rajeev Kumar Singh and Santanu Mishra, “A Novel Carrier Generation Based Fully Digital Hysteretic Modulator for Point-of-load Converters,” in IEEE-Energy Conversion Congress and Exposition (ECCE) 2012, pp. 364-371, Raleigh, NC, Sept. 2012.
- Ravindranath Adda, Olive Ray, Santanu Mishra, and Avinash Joshi, “Implementation and Control of Switched Boost Inverter for DC Nanogrid Applications,” in IEEE-Energy Conversion Congress and Exposition (ECCE) 2012, pp. 3811-3818, Raleigh, NC, Sept. 2012.
- Olive Ray, Santanu Mishra, and Avinash Joshi, “Implementation and Control of a Bidirectional High-Gain Transformer-less Standalone Inverter,” in IEEE-Energy Conversion Congress and Exposition (ECCE) 2012, pp. 3233-3240, Raleigh, NC, Sept. 2012.
- Olive Ray and Santanu Mishra, “A Modified Boost Topology with Simultaneous AC and DC Load,” in IEEE-Energy Conversion Congress and Exposition (ECCE) 2012, pp. 2454-2459, Raleigh, NC, Sept. 2012.
- Rajeev Kumar Singh and Santanu Mishra, “A Digital Feedback Clamped Synthetic Ripple Based Hysteretic Modulator for Optimal Battery Charging,” in IEEE-IECON 2012, ÉTS, Montréal, Canada, pp. 62-67, 25 – 28 October 2012. (Best Paper in Session)
- Ravindranath Adda, Olive Ray, Santanu Mishra and Avinash Joshi, “DSP based PWM control of Switched Boost Inverter for DC Nanogrid applications,” in IEEE-IECON 2012, ÉTS, Montréal, Canada, pp. 5285-5290, 25 - 28 October 2012.
- Rajeev Singh and Santanu Mishra, “A digital optimal battery charger with the inbuilt fault detection property,” in IEEE-PEDES, Bangalore, India, Dec. 2012.
- Kapil Jha and Santanu Mishra, “A Dynamic Linearizing Modulator Based Boost Inverter,” in IEEE Applied Power Electronics Conference & Expo, (APEC 13), pp. 2369-2374, 17 March 2013, Long Beach, CA.
- Ravindranath Adda, Olive Ray, Santanu Mishra, and Avinash Joshi, “Single Phase Utility Interactive Switched Boost Inverter for Renewable Energy Based Residential Power Applications,” in IEEE Applied Power Electronics Conference & Expo, 17 March 2013 (APEC 13), pp. 3283-3287, Long Beach, CA.
- Olive Ray, Anil J., and Santanu Mishra, “A Multi-port DC-DC Converter topology with simultaneous Buck and Boost outputs,” in ISIE’13, pp.1-6, Taipei, Taiwan.
- Arun Shankar U., Soumya Subhra Nag, and Santanu Mishra, “Multi-input Single-Control Battery Charger for DC Nano-grids,” in IEEE ECCE –Asia (downunder), Melbourne Australia, pp. 304-310, June 3-6 2013.
- Saurabh Shekhar, Santanu Mishra and Avinash Joshi, “A Utility Interfaced Half-Bridge Based Capacitively Coupled Power Transfer Circuit with Automatic Frequency Control,” in IEEE-Energy Conversion Congress and Exposition (ECCE) 2013, Denver, CO, pp.1598-1602, Sept. 15-19, 2013.
- Soumya Shubhra Nag and Santanu Mishra, “Current-Fed DC/DC Topology Based Inverter,” in IEEE-Energy Conversion Congress and Exposition (ECCE) 2013, Denver, CO, pp. 2751-2756, Sept. 15-19, 2013.
- Ravindranath Adda, Avinash Joshi and Santanu Mishra, “Pulse Width Modulation of Three Phase Switched Boost Inverter,” in IEEE-Energy Conversion Congress and Exposition (ECCE) 2013, Denver, CO, pp. 769-774, Sept. 15-19, 2013.
- Olive Ray and Santanu Mishra, “A Multi-port converter topology with simultaneous Isolated and Non-Isolated Outputs,” in IEEE-Industrial Electronics Conference (IECON 2013), Vienna, Austria, pp. 7116-7121, Nov. 2013.
- Soumya Shubhra Nag, Ravidranath Adda, Olive Ray, and Santanu Mishra, “Current-Fed Switched Inverter Based Hybrid Topology for DC Nanogrid Application,” in IEEE-Industrial Electronics Conference (IECON 2013), Vienna, Austria, pp. 7144-7149, Nov. 2013. (Best Paper in Session).
- Kapil Jha and Santanu Mishra, “Improving the Large Signal Gain of Dynamic Linearizing Modulator Controlled Boost Converter,” in IEEE-Industrial Electronics Conference (IECON 2013), Vienna, Austria, pp. 880-885, Nov. 2013.
- Santanu Mishra and Olive Ray, “Advances in Nanogrid Technology and Its Integration into Rural Electrification in India,” accepted in IEEE IPEC-Hiroshima 2014 -ECCE ASIA , Hiroshima, Japan. (Invited Paper)
- Soumya Shubra Nag and Santanu Mishra, “Coupled Inductor Based Current-Fed Switched Inverter for Low Voltage Renewable Interface,” accepted in IEEE IPEC-Hiroshima 2014 -ECCE ASIA, Hiroshima, Japan. (Invited Paper)
- Olive Ray, Vimala Dharmarajan, Santanu Mishra, and Prasad Enjeti, “Analysis and PWM Control of Three-Phase Boost-Derived Hybrid Converter,” accepted in IEEE-Energy Conversion Congress and Exposition (ECCE) 2014, Pittsburgh, PA, USA, in September 14-18, 2014.
- Ravindranath Adda, Avinash Joshi, and Santanu Mishra, “Output Voltage Control of 3-phase Switched Boost Inverter for Standalone Renewable Energy Based Distribution Generation Systems,” accepted in IEEE-Energy Conversion Congress and Exposition (ECCE) 2014, Pittsburgh, PA, USA, in September 14-18, 2014.
- Soumya Nag, Arun Sankar, Santanu Mishra, and Avinash Joshi, “Input Current Ripple Cancellation of Current-Fed Switched Inverter,” accepted in IEEE-Energy Conversion Congress and Exposition (ECCE) 2014, Pittsburgh, PA, USA, in September 14-18, 2014.
- Soumya Nag and Santanu Mishra, “Improved Trans-Current-Fed Switched Inverter,” accepted in IEEE-Energy Conversion Congress and Exposition (ECCE) 2014, Pittsburgh, PA, USA, in September 14-18, 2014.
- Arun Shankar, Santanu Mishra, K. Viswanathan, and Rajendra Naik, “Control of a Series Input Boost Pre-regulator with Unbalanced Load,” accepted in IEEE Ind. Elect. Society Annual Meeting (IECON), Dallas, TX, 2014.
- Jinia Roy, Olive Ray, and Santanu Mishra, “Maximizing Power Harvest of a large PV Farm,” accepted in IEEE Ind. Elect. Society Annual Meeting (IECON), Dallas, TX, 2014. (Best Paper in Session)
- Kapil Jha and Santanu Mishra, “Boost based Power Amplifier for Power Hardware in Loop Simulations,” accepted in IEEE-Power Electronics Drives and Energy Systems Conference (PEDES), Mumbai, 2014.
- Soumya Shubhra Nag and Santanu Mishra, “Family of Current-Fed Switched Inverter Derived Inverters,” accepted in IEEE-Power Electronics Drives and Energy Systems Conference (PEDES), Mumbai, 2014.
- Rajeev Singh
- Ravindranath Adda
- Venkateswara Reddy Mulla
- Saurabh Upadhyay
- Kapil Jha
- Rakesh Rawal
- Bijendra Verma
- Makarand Mijar
- Mukesh
Dr. Santanu Mishra
Email: This email address is being protected from spambots. You need JavaScript enabled to view it.
Location: ACES 101, IIT Kanpur
Research

- Power System Operation and Control
- Power System Dynamics and Stability.
- Wide Area Measurement Systems.
- Power System State Estimation
- Power System Reliability.
- HVDC Transmission and FACTS?
- Power System Deregulation
- Smart Grid and Distributed Generation
- Micro-Grids and MVDC System
- Artificial Intelligent Application to Power Systems
- Northern Regional Power Grid (NRPG) Data
- Power System Simulation Lab having software such as PSS-E, PSS-adapt, MiPower, PowerWorld Simulator, MATLAB, PSCAD, PSAT, Cherry PST, GAMS, NEPLAN and other in house developed software.
- New PG Power and Control Lab.
- Two high speed servers, scanner, printer, Xeroxing and other high speed computing facilities.
- Improvement of Operation performance of integrated AC/DC system through multiple controllable devices
Status: completed
MHRD
Rs 13.0 lakh
Dr SN Singh - Strategies for Promotion of Energy Efficient and Cleaner Technologies in the Power Sector
Status: completed
SiDA through
AIT Thai-land
Rs.16.0 lakhs
Prof SC Srivastava,Dr. Anoop Singh, Dr. Mukesh Sharma and Dr SN Singh - Enhancement of Power Systems performance using FACTS in competitive power market.
Status: completed
CPRI/ MoP
Rs. 18.4 lakhs
Dr SN singh and Prof SC Srivastava - Assessment and Analysis of Electric Power Quality Problems using AI and Advanced Digital Signal Processing Techniques
Status: completed
DST
Rs 10.22 lakhs
Dr SN Singh and Prof SC Srivastava - Performance Analysis and Trading of Wind power Generation in Emerging Power System >br>Status: Sanctioned
CPRI/ MoP
Rs 21.60 lakhs
Dr SN Singh - EHV/UHV Transmission system planning for UPPTCL
In progress
UP PTCL
Lucknow
Rs 50.0 Lakhs
Prof SC Srivastava, Dr SN Singh and Dr N Gupta - Technical report of MDI and low power factor of m/s Guatam Cement, Hamirpur.
Status: completed
DVVNL Banda
Rs 28060
SN Singh - Study on demand and energy charges against import of power during peak hours without drawl of active power
UP Sug. Mills Cogen Asso.
Rs 210675/-
SN Singh - EHV/UHV Transmission system planning for UPPTCL- Study cell IIT Kanpur.
Status:In progress
UP PTCL
Rs 20.0 Lakhs
SC Srivastava, SN Singh and N Gupta - Development of Transmission pricing scheme for Orissa Grid
Status:In progress
OERC
9.86 lakh
SN Singh and Anoop Singh - Third Party Quality checking of works of UPSIDC
Status: completed
UPSIDC
Rs 112360
SN SIngh
- A.Sharma, P. Banerjee, S.C.Srivastava, and S. Chakrabarti, “Monitoring of Devices Installed at Remote Locations”, Indian Patent Application No. 1322/DEL/2014 (Filed).
A)REFEREED JOURNALS
- A. Sharma, S.C.Srivastava, and S. Chakrabarti, “Multi-Agent-Based Dynamic State Estimator for Multi-Area Power System”, IET Proc. on Generation, Transmission & Distribution, Vol.10, Issue 1, January 2016, pp. 131-141.
- A. Sharma, S.C. Srivastava, and S. Chakrabarti, “Testing and Validation of Power System Dynamic State Estimators using Real Time Digital Simulator (RTDS)", Accepted for publication in IEEE Trans. on Power Systems, paper no. TPWRS-00100-2015.R2.
- V. Vignesh, S. Chakrabarti, and S.C. Srivastava, "Power System Load Modelling Under Large and Small Disturbances Using PMU Data”, IET Proc. on Generation, Transmission & Distribution, Vol.9, Issue 12, 2015, pp. 1316-1323.
- Mahesh Kumar, S. N. Singh and S.C. Srivastava,"Control Strategies of a DC Microgrid for Grid Connected and Islanded Operations”, IEEE Transactions on Smart Grid, Vol. 6, No.4, July 2015, pp. 1588-1601.
- A. Sharma, S.C. Srivastava, and S. Chakrabarti,"A Multi-Agent based Power System Hybrid Dynamic State Estimator for Smart Grid Application", IEEE Transactions on Intelligent Systems, Vol.30, Issue 3, May 2015, pp.52-59.
B) PROCEEDINGS OF CONFERENCES
National Conferences (in India)
- P. Banerjee, S. C. Srivastava and K. N. Srivastava, “A Lyapunov Exponent based Method for Online Transient Stability Assesment”, Proc. 18th National Power Systems Conference, IIT Guwahati, December 18-20, 2014.
- P. Banerjee, S. C. Srivastava and K. N. Srivastava, “A Lyapunov Exponent based Method for Online Transient Stability Assesment”, Proc. 18th National Power Systems Conference, IIT Guwahati, December 18-20, 2014.
- Ankush sharma, Ch. V.V.S. Bhaskara Reddy, P. Banerjee, Bibhu Prasad Padhy, S.C. Srivastava and Saikat Chakrabarti,"Synchrophasor based Power System Monitoring and Control using Real Time Digital Simulation Facility" Proc. 17th National Power Systems Conference, IIT (BHU) Varanasi, December 12-14, 2012.
- Mahesh Kumar, S.N.Singh and S.C. Srivastava," Control Strategy of Single-Phase Voltage Controlled VSI Fed Load Connected to DC Microgrid" Proc. 17th National Power Systems Conference, IIT (BHU) Varanasi, December 12-14, 2012.
lnternational Conferences
- Anju Meghwani, S.C. Srivastava and Saikat Chakrabarti, “A New Protection Scheme for DC Microgrid Using Line Current Derivative” 15 PES GM1108, Accepted for presentation in IEEE Power and Energy Society General Meeting 2015, Denver, USA, 26-30 July, 2015.
- V. Vignesh, Saikat Chakrabarti, and S.C. Srivastava, “Classification and Modelling of Loads in Power Systems using SVM and Optimization Approach” 15 PES GM0796, Accepted for presentation in IEEE Power and Energy Society General Meeting 2015, Denver, USA, 26-30 July, 2015.
- Mahesh Kumar, S. C. Srivastava, and S. N. Singh, “Real Time Simulation of a DC Microgrid with Control Schemes for Power Management and Voltage Stabilization”. Accepted for presentation in ASME Power & Energy 2015 Conference, San Diego, USA, June 28-July 02, 2015.
- Mahesh Kumar, S. C. Srivastava, and S. N. Singh, “Dynamic Performance Analysis of DC Microgrid with a Proposed Control Strategy for Single-Phase VCVSI”, 2014 IEEE PES Transmission & Distribution Conference & Exposition, Chicago, IL, USA, April 14-17, 2014.
- Vignesh V., S. Chakrabarti, and S. C. Srivastava, “An experimental study on the load modelling using PMU measurements,” IEEE PES Transmission & Distribution Conference & Exposition, Chicago, USA, April 14-17, 2014.
Prof SC Srivastava, Prof SN Singh, and Dr S Chakravorti
Location: ACES 105 and WLE 312
Research

Power Electronic Converters, Power Quality, Electric Drives, Renewable Energy
- Quasi Resonant Inverter-fed High Performance Induction Motor Drive
- Some Studies on Unified Power Quality Conditioners
- Switch Mode Utility Friendly Rectifiers for DC and Magnetic Power Supplies
- Unified Power Quality Conditioner with Minimum VA Loading
- Utility Friendly Three-level Neutral Clamped Converter-Inverter System for Direct Torque and Flux Controlled Induction Motor Drive
- AC-AC Matrix Converter with Improved Commutation Technique
- Mr. Amit K. Basu
Dr. SP Das
Email: This email address is being protected from spambots. You need JavaScript enabled to view it.
Location: WL 111, IIT Kanpur
Research

Integration of Solar PV
DC-DC and DC-AC converters for solar PV.
High reliable grid feeding solar PV inverters.
Health monitoring of Aluminum Electrolytic Capacitors (AECs) in solar PV inverters
Microgrids and Distributed Generation
Modelling and Control of AC and DC Microgrids.
Converters for integration of sources and storage elements to DC Microgrid.
UPS and Power Quality
Design and digital control of Uninterruptible Power Supply (UPS)
STATCOMs, Active Filters, Static Voltage Regulator and other FACTS devices.
- High Reliability DC-DC Converter for Integrating Battery with Low Voltage DC System
Funding Agency: FAST Track Scheme, Science & Engineering Research Board (SERB)
Duration: 3 Years (2014-2017)
Status: Active - Smart Power Electronic Converters for Renewable Integration
Funding Agency: INSPIRE Faculty Fellowship Grant, Department of Science & Technology (DST), Govt. of India
Duration: 5 Years (2013-2018)
Status: Active - Power Electronic Converters for Interfacing Solar Photovoltaics with Low Voltage DC System
Funding Agency: Indian Institute of Technology (IIT) Kanpur
Duration: 2 Years (2013-2015)
Status: Completed - Development of Scaled-down Laboratory Prototype of Static Voltage Regulator (SVR)
Funding Agency: Emerson Network Power (I) Pvt. Ltd.
Duration: 1 Years (2014-2015)
Status: Completed
Condition Monitoring of Aluminum Electrolytic Capacitors:
Patent Application Pending
Existing single phase direct grid feeding solar PV inverter are based on voltage source inverter topologies. Aluminum electrolytic capacitors (AEC) are used as an energy storage element in these inverters, to limit second harmonic voltage ripple to a low value and to maximize the PV power extraction efficiency (PEE). AECs are popularly used due to their high energy density as compared to other capacitors. However, AEC degrades due to its electrolyte loss with time, which leads to rise in equivalent series resistance (ESR) and fall in capacitance value. Further, the rate of loss in electrolyte increases with temperature. This leads to increase in magnitude of ripples in PV voltage with ageing. This reduces the PEE, which results in less power availability from solar PV system. Increase in voltage ripple could also lead to failure of inverter.
To avoid this, we have developed online techniques to monitor the health of AEC in solar PV inverters. These techniques would provide timely indication of the capacitor (AEC) failure, thereby avoiding downtime of the solar PV system.
High Reliable Solar Inverter
Indian Patent, Appl. No. 2912/MUM/2011
Life of solar PV panels is more than 20 years. However, inverters are less reliable and typically have 3-7 years of life span, beyond which high failure rate of inverters is expected. Failures of power electronic converters are mainly due to the following components: (i) Aluminum Electrolytic Capacitors (AEC), and (ii) Switching semiconductor devices.
We have proposed a high reliable solar inverter topology. It is based on current source converter, which uses inductors to store energy instead of AEC, thereby increasing the operational life. The proposed inverter is a transformer-less pulse width modulated (PWM) current source inverter. Further, this inverter offers inherent voltage boost feature, which avoids the use of additional dc-dc converter in case of low voltage solar PV string. This improves the conversion efficiency due to single stage conversion.
Dynamic Voltage Restorer
Technology Transferred
Dynamic Voltage Restorer (DVR) is a custom power device used in electrical distribution system for power quality improvement. The main application of DVR is for voltage compensation of sensitive loads against voltage disturbances like sag and swell in distribution lines. A 5kVA, IGBT based, digitally controlled single phase DVR is designed and developed. It is capable of regulating the load voltage within 2% of its nominal value (230V) for grid voltage variation of 185V to 265V.
High Reliable Solar Inverter
Indian Patent, Appl. No. 2912/MUM/2011
- Amit Meena, Shirazul Islam, Sandeep Anand, Yogesh Sonawane and Sanjay Tungare, "Design and Control of Single Phase Dynamic Voltage Restorer," 7th National Power Electronics Conference, NPEC'2015, Mumbai, India, Dec. 2015
- Rashmi Shukla, Md. Waseem Ahmad, Nikunj Agarwal, Sandeep Anand, "Accelerated Ageing of Aluminum Electrolytic Capacitor," 7th National Power Electronics Conference, NPEC'2015, Mumbai, India, Dec. 2015
- Md. Waseem Ahmad, Abhinav Arya and S. Anand, "An Online Technique For Condition Monitoring Of Capacitor In PV System," IEEE International Conference on Industrial Technology, ICIT'2015, Seville, Spain, March 2015
- Abhinav Arya, Md. Waseem Ahmad and S. Anand, "Online Monitoring of Power Extraction Efficiency for Minimizing Payback Period of Solar PV System," IEEE International Conference on Industrial Technology, ICIT'2015, Seville, Spain, March 2015
- Shirazul Islam and S. Anand, "Eigenvalue Sensitivity Analysis of Microgrid with Constant Power Loads," IEEE Power Electronics, Drives and Energy Systems Conference, PEDES'2014, Mumbai, India, Dec. 2014
- S. Anand and B.G. Fernandes, "Power Management Control for Solar Photovoltaic Based DC System," 40th Annual Conference of the IEEE Industrial Electronics Society, IECON'2014, Dallas, TX, USA, Oct.-Nov. 2014
- S. Anand, Saikrishna Kashyap and B.G. Fernandes, "Transformer-less Grid Feeding Current Source Inverter for Solar Photovoltaic System," IEEE Transactions on Industrial Electronics, 2014
- S. Anand and B.G. Fernandes, "Reduced Order Model and Stability Analysis of Low Voltage DC Microgrid," IEEE Transactions on Industrial Electronics, vol.60, no.11, pp.5040-5049, Nov. 2013
- S. Anand, B.G. Fernandes and Josep Guerrero, "Distributed Control to Ensure Proportional Load Sharing and Improve Voltage Regulation in Low Voltage DC Microgrids," IEEE Transactions on Power Electronics, Vol. 28, Issues 4, pp. 1900-1913, April 2013
- S. Anand, K. Chatterjee and B.G. Fernandes, "DC Voltage Controller for Asymmetric Twin Converter Topology Based High Power STATCOM," IEEE Transactions on Industrial Electronics, Vol. 60, Issue 1, pp. 11-19, Jan 2013
- S. Anand and B.G. Fernandes, "Multilevel Open-ended Transformer Based Grid Feeding Inverter for Solar Photovoltaic Application," 38th Annual Conference of the IEEE Industrial Electronics Society, IECON'2012, Montreal, Canada, Oct. 2012
- S. Anand, R.S. Farswan, B. Mangu and B.G. Fernandes, "Optimal Charging of Battery using Solar PV in Standalone DC System," IET Conference on Power Electronics Machines and Drives, PEMD'2012, Bristol, UK, March 2012
- S. Anand and B.G. Fernandes, "Steady State Performance Analysis for Load Sharing in DC Distributed Generation System," 10th International Conference on Environment and Electrical Engineering, EEEIC'2011, Rome, May 2011
- S. Anand and B.G. Fernandes, "Modified Droop Controller for Paralleling of DC-DC Converters in Standalone DC System," IET Journal of Power Electronics, Vol. 5, Issue 6, pp. 782-789, July 2012
- S. Anand, R.S. Farswan and B.G. Fernandes, "Unique Power Electronics and Drives Experiment Bench (PEDEB) to Facilitate Learning and Research," IEEE Transactions on Education, Vol. 55, Issues 4, pp. 573-579, Nov. 2012
- S. Anand and B.G. Fernandes, "Optimal Voltage Level for DC Microgrids," 36th Annual Conference of the IEEE Industrial Electronics Society, IECON'2010, Phoenix, Arizona, USA, Nov. 2010
- S. Anand, B.G. Fernandes and K. Chatterjee, "A New 4-level Open-Ended Transformer based STATCOM for High Power Applications," 36th Annual Conference of the IEEE Industrial Electronics Society, IECON'2010, Phoenix, Arizona, USA, Nov. 2010
Dr. Sandeep Anand,ACES 103 A, Dept. of Elec. Engg, IIT Kanpur
- Waseem Ahmad
- Shirazul Islam
- Bhavna Rathore
- Varsha Shukla
- Arun Singh
- Nikunj Agarwal
- Saurav Roy Chaudhary
- Maguluri Avinash
- Nishant Kashyap
- Soumya Thomas
- Rajender Nune
Dr. Sandeep Anand
Email: This email address is being protected from spambots. You need JavaScript enabled to view it.
Location: ACES 103 A, Dept. of Elec. Engg, IIT Kanpur
- Details
- Last Updated: Wednesday, 25 October 2023 11:45
Welcome to the Controls and Automation group in the Department of Electrical Engineering, IIT Kanpur. The stream offers M.Tech. and PhD programs.
On the control systems front, the research interests of the group include applications of control theories such as robust control, linear and non linear control, intelligent techniques (fuzzy logic and neural networks), adaptive control, sliding mode control, etc, to modern areas such as robotics, mobile robots, consensus and cooperation among multiple agents, quadrotors, and all-wheel independent drive electric vehicles.
On the instrumentation front, the research interests of the group include smart and intelligent sensors, virtual instrumentation, intelligent systems and modeling, soft-computing, data mining, machine learning, brain-computer interface, computer vision, intelligent informatics, intelligent condition-based monitoring, computational intelligence, business intelligence, and related applications in various domains.
The faculty members have multiple projects funded by government and private agencies, and are working on them with active support from students.
We use system theoretic and experimental approaches to address the control issues in engineering systems, primarily in the biomolecular systems, robotics, and smart grids.
At present, we are focusing on Models, Dynamics, and Control of Biomolecular Systems, Design, Develop, and Control of Robots in Healthcare, Stability Improvement in Power Systems using Controllers, Developing Control Theory for Robustness Design and Faster Adaptions, Applications of AI, ML, and other Data Driven Approaches for Circuit Design, Estimation and Control of Electrical Vehicles and Aircraft, and Developing Space Probiotics for Gaganyaan Mission. In summary, we are a multidisciplinary research group focusing on developing control engineering frameworks for systems of real world applications that serve technology and benefit mankind.
- Krishan K Gola, Abhilash Patel, Shaunak Sen, Tradeoffs in the Design of RNA Thermometers, Physical Biology, 2024, Vol. 21(4), 044001, doi: 10.1088/1478-3975/ad5d6b
- Neeta Yadav, Abhilash Patel, Bidyadhar Subuddhi, Time Delayed Control for Maneuvering of Magnetic Micro/Nanorobots in Drug Delivering Applications, Accepted for Indian Control Conference 2024, IISER Bhopal
- Shikha S Chauhan, Abhilash Patel, Lyapunov characterization of Fold Change Detection and Adaptation in Biomolecular Systems, IFAC Advances in Control and Optimization of Dynamical Systems 2024, SNU Delhi
- Abhilash Patel, Guy-Bart Stan, Exploiting Resource Constraints for Controlling Biomolecular Circuits, IEEE Conference on Decision and Control, 2023, Singapore, Singapore
- Bhabani S Dey, Anirudh Nath, Abhilash Patel, Indra Narayan Kar, A Contraction Theory Approach to Observer-based Controller Design for Glucose Regulation in Type 1 Diabetes, Indian Control Conference, 2022, IIT Hyderabad, Hyderabad
- Abhilash Patel, Shaunak Sen, Indra N Kar, A Contraction Theory-based Framework for the Design of Robustness to Global Perturbations in Biomolecular Circuits, IEEE Conference on Decision and Control, 2022, Cancun, Mexico
- Abhilash Patel, Sandip Ghosh, An Unknown Input Observer Based Framework for Wide-Area Control of Inter-Area Oscillations with Local Measurement, Advances in Control and Optimization of Dynamical Systems, 2022, NIT Silchar and IIT Guwahati, India
- Abhilash Patel, Spandan Roy, Simone Baldi, Wide-Area Damping Control Resilience towards Cyber-Attacks: A Dynamic Loop Approach, IEEE Transactions on Smart Grid, 2021, Vol. 12(4), P. 3438 - 3447, doi: 10.1109/tsg.2021.3055222
- Praodsh R Sahoo, Abhilash Patel, Sandip Ghosh, Asim K Naskar, Selection of Overlapping Interaction Through Approximate Decentralized Fixed Mode Measure, 2021, Vol. 52(9), P. 1882-1893, International Journal of System and Science, doi: 10.1080/00207721.2021.1872115
- Abhilash Patel, Richard M Murray, Shaunak Sen, Assessment of Robustness to Temperature in a Negative Feedback Loop and a Feedforward Loop, ACS Synthetic Biology, 2020, Vol. 9(7), P. 1581-1590, doi: 10.1021/acssynbio.0c00023
- Abhilash Patel, Shaunak Sen, Experimental Evidence for Constraints in Amplitude-Timescale Co-variation of a Biomolecular Pulse Generating Circuit Design, IET Systems Biology, 2020, Vol. 15(4), P. 217-222, doi:10.1049/iet-syb.2019.0123
- Abhilash Patel, Shaunak Sen, Computational Framework for Design of a Pulse Generating Biomolecular Circuit, Advances in Control and Optimization of Dynamical Systems, 2020, IIT Madras, India
- Abhilash Patel, Soumyadeep Banerjee, Pranjal Gupta, Nishant K Sharma, Shaunak Sen, Characterization of Gene Expression Regulated by Combined Action of a Chemical Inducer and Temperature, Synthetic Biology: Engineering, Evolution and Design, 2019, New York, USA
- Spandan Roy, Abhilash Patel, Indra N Kar, Analysis and Design of a Wide-Area Damping Controller for Inter-Area Oscillation with Artificially Induced Time Delay, IEEE Transactions on Smart Grid, 2019, Vol. 10(5), P. 3654 - 3663, doi:10.1109/tsg.2018.2833498
- Abhilash Patel, Shaunak Sen, Non-normality Can Facilitate Pulsing in Biomolecular Circuits, IET Systems Biology, 2018, Vol. 12(5), P. 199-204, doi: 10.1049/iet-syb.2018.0008
- Abhilash Patel, Sandip Ghosh, Komla A. Folly, Inter-Area Oscillations Damping with Non-Synchronized Wide-Area Power System Stabilizer, IET Generation, Transmission & Distribution, 2018, Vol. 12 (12), P. 3070-3078, doi: 10.1049/iet-gtd.2017.0017
- Sandip Ghosh, Komla A. Folly, Abhilash Patel, Synchronized Versus NonSynchronized Feedback for Speed-Based Wide-Area PSS: Effect of Time-Delay, IEEE Transactions on Smart Grid, 2018, Vol. 9(5), P. 3976 - 3985, doi:10.1109/tsg.2016.2645453
- Abhilash Patel, Shaunak Sen, On Amplitude-Timescale Constraints in a Pulse Generating Biomolecular Circuit, Indian Control Conference, 2018, IIT Kanpur, India
- Abhilash Patel, Mithu Sarkar, Sandip Ghosh, Bidyadhar Subudhi, H infinity Design of Wide-Area Controller for Damping Inter-Area Oscillations in Power System, 1st International Conf. Emerging Trends in Engineering, Technology and Science, 2017, Delhi, India
- Abhilash Patel, Sudhansu Samal, Sandip Ghosh, Bidyadhar Subudhi, A Study on Wide Area Controller Design for Inter-Area Oscillation Damping, 2nd International Instrumentation, Energy and Communication, 2016, Kolkata, India
- Biological Safety Cabinet Class II (1300 Series A2 Class II BSC, Thermofisher)
- Benchtop Refrigerated Centrifuge (Sorvall™ Legend™ Micro 17R, Thermofisher)
- Multimode Microplate Reader (Cytation5, BioTek)
- Varioskan LUX Microplate Reader (Thermofisher)
- Live-Cell Fluorescence Microscopy (Lionheart FX, BioTek)
- Nucleic Acid Quantification (Take 3 Plate, BioTek)
- Fluorescence Digital Microscope (EVOS M5000, Thermofisher)
- Real Time PCR (CFX Opus 96, BIO-RAD)
- Thermocycler (T100, BIO-RAD)
- Microbiology Orbital Incubator Shaker (Orbitek)
- Temperature Incubator (iTherm CH25, Accumax)
- Visi Laboratory Refrigerator (FKG400) X 2 (Cellfrost)
- Deep Freezer -20 degree, (BFS 345 S, Cellfrost)
- Ultra-Low deep freezer (-86 degree, Thermofisher)
- Analytical Balance (Sartorious)
- Microspin (iFUGE-M08, Accumax)
- Vortex (iSix-vt) X 2 (Accumax)
- Microplate Washer (BioTek 50TS, BioTek)
- Dry Bath (DBI10, Labman)
- Hot Air Oven (RDHO 80, Remi)
- pH Meter (pH 2700, Eutech [Thermo])
- Double Distillation (DDU4000, Borosil)
- Vertical Autoclave (Labline)
- Ice Flake Machine (BRIF 100, BR Biochem)
- 3D Printer (Pratham 3.0, MAKE3D)
- Programmable Coil Winding Machine (MWT01)
- Microrobotic Actuation Setup (Neeta Yadav)
- Optical Zoom Microscope (MSZ, Magnus)
- Computational Facility
- 5 DOF Robotic Manipulator with Programming Board (DOFBOT)
We are open to share all these facilities to IITK as well as NON-IITK Users following the norms of the institute.
- Development and Characterization of Regulatory Biomolecular Circuits in Synthetic Biology, Sponsoring Agency: DBT, Sep)t 2024-Sept 2027, PI
- Design of Synthetic Genetic Circuits: Robustness towards Change in the Growth Rate, Sponsoring Agency: MoE, May 2024-May 2027, PI
- Design and Development of a Tether System for Drone Application, Sponsoring Agency: DRDO, May 2024-Nov 2025, co-PI
- Design and Development of Ground Robots for Autonomous Navigation Systems, Sponsoring Agency: TIH Foundation IITB, Dec 2023- July 2025, co-PI
- Mitigating Resource Burden of Heterologous Biomolecular Circuits in Escherichia Coli, Sponsoring Agency: DBT/Wellcome Trust India Alliance, Jan 2024- Dec 2029, PI
- AI Based Pose Estimation and Tracking of Uncooperative Airborne Vehicle, Sponsoring Agency: ARDB DRDO, Nov 2023- Nov 2025, co-PI
- Design And Development of Autonomous Stairs/Escalator Climbing & Self-Navigating Smart Wheelchair, Sponsoring Agency: IIT Kanpur, June 2023- June 2025, co-PI
- Nanorobotic Drug Delivery System & Lab-On-Chip Platform Development, Sponsoring Agency: IHFC Delhi, March 2023- March 2026, PI
- Investigation And Design of Robustness in Pulse Generating Biomolecular Circuits, Sponsoring Agency: IIT Kanpur, March 2022- March 2024, PI
- Complex Defense Object Recognition and Autonomous Handling in Unstructured and Noisy Outdoor Environment (Phase-I), Sponsoring Agency: DRDO, Aug 2019- Dec 2023, Co-PI
- Shikha Singh Chahuan, PhD Student
- Akshay Jaiswal, PhD Student
- Neeta Yadav, PhD Student
- Utkarsh Singh Solanki, PhD Student
- Saikat Majumdar, PhD Student
- Lisa Naik, PhD Student
- Prakhar Bajpai, PhD Student
- Arvind Trivedi, PhD Student
- Arun Thapa, Postdoctoral Research Associate
- Aditi Srivastava, Postdoctoral Research Associate
- Paramhans Yadav, Project Technical Supervisor
- Cdr. Faraz Ahmad, MTech Student
- Vamsi Krishna Kusmi, MTech Student
- Sneha Nalluri, MTech Student
- Ann Mary S, Project Associate
- Soumya, Project Associate
- Esha Singh, Project Assistant
- Vivek Kumar Kharwar, Multiskilled Worker
Dr. Abhilash Patel
Email: This email address is being protected from spambots. You need JavaScript enabled to view it.
Office Address: 610, ESB2, Indian Institute of Technology Kanpur, Kanpur-208016, UP, India
Office Phone: +91-512-679-2322
 Location: ACES 107
Location: ACES 107
Faculty Incharge: Dr.K.Nishchal Verma
Lab Contact No: 7032
Research Areas: Intelligent Data Mining Algorithms, Health Monitoring and Intelligent Fault Diagnosis Systems, Soft-Computing in, Modeling and Control, Machine Learning Algorithms, Computer Vision, Bioinformatics, Intelligent Informatics, Fuzzy Controllers
Facilities
- A seven degrees of freedom Robot Manipulator from Schunk, Germany with visual feedback loop both in eye-to-hand and eye-in-hand configurations
- A six degrees of freedom robot manipulator from ABB with visual feedback loop in eye-in-hand configuration
- A Patrolbot from Active Media for navigation experiments
- An Exo-skeleton hand set-up controlled by EMG signal
- An Inverted Pendulum Set up for testing nonlinear control algorithms using intelligent techniques
- Silicon Graphics Prism Server
- Intelligent Control
System identification and control of nonlinear systems can be efficiently carried out using intelligent control schemes. In this framework, our research work primarily focus on direct, indirect and model predictive control schemes using T-S fuzzy model, neural and fuzzy-neural networks. These control algorithms are being tested in real-time systems such as 7DOF Power-cube robot manipulator and inverted pendulum - Visual Servoing
Visual-motor coordination, also referred to as hand-eye coordination, in the context of robotics is the process of using visual information to control a robot manipulator to reach a target point in its workspace. The task requires learning the mapping that exists between camera output and desired end-effector location. Biological organisms have demonstrated their superior adaptive capabilities in motion control over present-day robotic systems. Inspired by this fact, various neural network models based on biological systems have been developed for robot control tasks. We have been working on various self-organizing schemes such as Kohonen SOM, Quantum clustering SOM and parametrized SOM to learn this map using minimum learning example. Simultaneously we are extending these approaches to the redundant manipulator system which involves optimization of multiple objective functions. Current research includes development of redundancy preserving SOM network and adaptive critic based visual servo control - Neural Networks
Research in this area focuses on efficient training schemes that would provide faster convergence, better generalization and least computational effort. Research work concerning quantum neural networks is also being carried out; some of these works have generated keen interest among peers - Visual Navigation of a Mobile Robot
Navigation is the process of planning and controlling the movement of a craft or vehicle from one place to another. Navigation in the context of robot includes three basic tasks
(1) object tracking
(2) estimation of depth and angle of object from the robot
(3) obstacle avoidance.
Various intelligent techniques such as TS fuzzy networks are used to develop higher-level sensory-motor coordination algorithms. Besides novel approaches for formation control and coordination of multi-robot systems are being developed - Assistive Robotics - Optimal Hand Exoskeleton
An optimal hand exoskeleton device for the impaired hand of the stroke patients is being developed. Each link in the finger is replicated by a four-bar mechanism which takes care of the instantaneously varying joint centres. The developed exoskeleton will generate flexible human like motion based on biological signals derived from the muscle/brain signals that directly reflect the subjects intension. The developed device can be used for the following cases
(i) To support the fingers of elderly persons who have reduced control over their finger force
(ii) Active hand prosthetics who have lost their fingers
(iii) Rehabilitation of patients with finger injury or neuro-muscular diseases
- Laxmidhar Behera and Indrani Kar, Intelligent Systems and Control: Principles and Applications, Oxford University Press, Nov 2009
- Indrani Kar and Laxmidhar Behera,Direct adaptive neural control for affine nonlinear systems, Applied Soft Computing, Vol. 9, pp.756-764, 2009
- K. Srinivas, and Laxmidhar Behera, Swing Up Control Strategies for a Reaction Wheel Pendulum, International Journal of Systems Science, Vol 39, No 12, 1165-1177, 2008
- Prem Kumar P., Indrani Kar and Laxmidhar Behera Variable gain controllers for nonlinear systems using T-S Fuzzy model, IEEE Trans Systems, Man and Cybernetics, Part B,Vol. 36, No. 6, pp1442-1449,2006
- Laxmidhar Behera, Query based model learning and stable tracking of a robot arm using radial basis function network, Computers and Electrical Engineering 29 (2003) 553-573
- Swagat Kumar, Laxmidhar Behera and TM McGinnity, Kinematic control of a redundant manipulator using inverse-forward adaptive scheme with a KSOM based hint generator, Robotics and Autonomous Systems,doi:10.1016/j.robot.2009.12.002, 2009
- Indrani Kar and Laxmidhar Behera, Visual Motor Control of a 7 DOF Robot Manipulator Using a Fuzzy SOM Network, Intelligent Service Robotics, Vol 3, No 1, pp 49-60, 2010
- Swagat Kumar, Prem Kumar, Ashish Dutta and Laxmidhar Behera,Visual Motor Control of a 7DOF Redundant Manipulator using Redundancy Preserving Learning Network, Robotica, doi:10.1017/S026357470999049X, 2009
- Swagat Kumar and Laxmidhar Behera, Visual Motor Control of a 7DOF Robot Manipulator Using Function Decomposition and Sub-clustering in Configuration Space, Neural Processing Letters. Vol. 28, No. 1, pp 17-33, 2008
- Nimit Kumar and Laxmidhar Behera, Visual Motor Coordination Using a Quantum Clustering Based Neural Control Scheme, Neural Processing Letters,Volume 20: 11-22, 2004
- Laxmidhar Behera, Swagat Kumar and Awhan Patnaik, On adaptive learning rate that guarantees convergence in feed-forward networks, (To be published) IEEE Trans Neural Networks, Vol. 17, No. 5 September 2006
- Laxmidhar Behera, Indrani Kar and Avshalom C. Elitzur, Recurrent Quantum Neural Network Model to Describe Eye Tracking of Moving Target, Foundations of Physics Letters, Vol. 18, No. 4, 357-370, 2005
- Laxmidhar Behera and Bharat Sundaram, Stochastic filtering and and Speech Enhancement using a Recurrent Quantum Neural Network, Proceedings Int. Conf. Int. Sensors and Inf. Processing, ICISIP-2004, Chennai, 165-170;Received Best Paper Award
- Laxmidhar Behera, Indrani Kar and A.C. Elitzur, Chapter 9: Recurrent Quantum Neural Network and Its Applications, in The Emerging Physics of Consciousness, Jack Tuszynski (Ed), Springer Verlag, 2005
- Anjan Kumar Ray, Patrick Benavidez, Laxmidhar Behera and Mo Jamshidi, Decentralized Motion Coordination for a Formation of Rovers, IEEE Systems Journal, Vol 3, No. 3, pp369-381, Sept 2009
- Anjan K Ray, Laxmidhar Behera and Mo Jamshidi, Sonar Based Rover Navigation for a Single or Multiple Platforms: Forward Safe Path and Target Switching Approach, IEEE Systems Journal, Vol 2, No. 2, pp. 258-272, 2008
- Meenakshi Gupta, T Naveen Kumar, Laxmidher Behera, K S Venkatesh and Ashish Dutta, Environment Modelling in Mobile Robotics through Takagi-Sugeno Fuzzy Model, Irish Signal and Systems Conference (ISSC), 2009, Dublin
- DST Sponsored Project on Intelligent Visual Control of Redundant Manipulator Systems for Grasping 3-D Objects, Rs 32 Lakhs, 2000
Status: Ongoing - DRDO Sponsored Project on Visual Motor Control of a Seven Degrees of Freedom Robot Manipulator, Rs. 50 lakhs at IIT Kanpu
Status: Ongoing - UKIERI Standard Research Award of GBP 144,000.00 on Innovations in Intelligent Assistive Robotics
Status: Ongoing - Quantum Neural Network Models - Applications of Quantum Learning to Health Care System and Visual Tracking System, Funded by Ministry of Human Resource and Development, India from 2005-2008, Rs 20.00 lakhs
Status: Completed - Intelligent Control Schemes and Application to Dynamic and Visual Control of Redundant Manipulator Systems, Funded by Department of Science and Technology, India from 2006-2008, Rs 20.00 lakhs
Status: Completed - Infrastructure development in Intelligent Sensors and Control, FIST grant from Department of Science and Technology, India, 2005-2007, Rs 65.00 lakhs
Status: Completed - MHRD Sponsored project, Adaptive nonlinear control - A foundational framework using classical and quantum algorithms, Rupees 6.00 lakhs, IIT, Kanpur
Status: Completed
- Awhan Patnaik
- Prem Kumar P
- Felix Orlando
- Meenakshi Gupta
- Vipul Arora
- Himansu Singh
- Benami Singh
- Chandrajit Choudhury
Dr. Laxmidhar Behera
Email: This email address is being protected from spambots. You need JavaScript enabled to view it.
Phone: 91 512 259 7198
Location: WL213
Research
- Practical applications of control system theory that will have significant positive impact on India and mankind
- Motion control of a four-wheel independent-steering four-wheel independent-drive electric vehicle
- Yokogawa DSO with CAN analyzer software
- ezDSP kits (F2808 and F2812)
- 8051 microcontrollers, dsPIC microcontrollers
- USB-CAN converters
- Lonworks' miniEVK
- EZDSK91C111 Ethernet network daughter boards for ezDSP kits
- PMDC motor control kits developed in-house
- Developed a digital automatic voltage regulator for BHEL Bhopal, jointly with Dr. P. Sensarma of the EE department, IITK (2007-2010)
- Developed a new Control systems Laboratory for EE department IIT Kanpur (2009)
- Developed feedback control strategies for coordination of the 10 motors that drive and steer ISRO's Moon Rover (2009-2015)
- Developed a path-tracking control strategy for a four-wheel independent-steering four-wheel-drive electric vehicle (Funded by DST SERC, 2012-2016)
- Ramprasad Potluri, Pushpak Bhole, and Abhishek Verma. "Disturbance Observer for Speed-Dependent Disturbance in Motor Control". Indian Control Conference. IEEE. IIT Madras, Chennai, India. January 2015.
- Manavaalan Gunasekaran, Ramprasad Potluri, and Ashish Dutta. "Path Tracking Control of a Moon Rover". Indian Control Conference. IEEE. IIT Madras, Chennai, India. January 2015.
- Ramprasad Potluri and Arun Kant Singh. "Path-Tracking Control of an Autonomous 4WS4WD Electric Vehicle Using its Natural Feedback Loops". IEEE Transactions on Control Systems Technology, Vol 23, Number 5, September 2015.
- Arun Kant Singh and Ramprasad Potluri. "Comments on “Model-Independent Adaptive Fault-Tolerant Output Tracking Control of 4WS4WD Road Vehicles”." IEEE Transactions on Intelligent Transportation Systems, Vol 16, Number 3, June 2015.
- Manavalan Gunasekaran and Ramprasad Potluri, "Low-Cost Undergraduate Control Systems Experiments Using Microcontroller-Based Control of DC Motor." IEEE Transactions on Education, Vol 55, issue 4, pp 508-516, November 2012.
- Potluri, Ramprasad; Singh, Arun Kant, "Path-Tracking Control of an Autonomous 4WS4WD Electric Vehicle Using its Natural Feedback Loops," 2013 IEEE Multi-Conference on Systems and Control (MSC 2013), Hyderabad, India. 28 - 30 August 2013.
- Saurav, Kumar; Potluri, Ramprasad, "Sensorless speed control of a permanent magnet DC motor by compensating the plant nonlinearities," 2013 IEEE International Symposium on Industrial Electronics (ISIE), pp.1 - 4. Taipei, Taiwan. 28-31 May 2013.
- Manavaalan Gunasekaran and Ramprasad Potluri. "Kinematics Modeling and Design of Motion Controller for a Moon Rover," 11th International Symposium on Advanced Vehicle Control (AVEC'12). Sept. 9 - 12, 2012, Seoul, Korea.
- Ramprasad Potluri and Arun Kant Singh. "Path-tracking control of an autonomous 4WS4WD electric vehicle using driving motors' dynamics," 7th IEEE International Conference on Industrial and Information Systems (ICIIS), 2012, pp.1-6, 6-9 Aug. 2012, IIT Madras, Chennai, India.
- Ramprasad Potluri. Comments on “Chattering Free Robust Control for Nonlinear Systems.” IEEE Transactions on Control Systems Technology, Vol. 20, Issue 2, pp. 562 -- 562, March 2012
- Ramprasad Potluri. Comments on “Optimal Fault-Tolerant Path-Tracking Control for 4WS4WD Electric Vehicles”. IEEE Transactions on Intelligent Transportation Systems, Volume: 12, Issue: 2, 2011, Page(s): 622 - 623.
- Manavaalan Gunasekaran and Ramprasad Potluri. Cooperative control of a dual-motor ball and beam system. INDICON 2008. IEEE, 2008.
- Ramprasad Potluri, et al. Networked Control Systems and a Mixed Open-Loop/Closed-Loop Control. Advances in Control and Optimization of Dynamical Systems (ACODS), IISc, Bangalore, India, February 2007
- Manavaalan Gunasekaran (Graduated in May 2015)
Thesis Title: Path tracking control of a Moon rover: modeling, design, and implementation - Arun Kant Singh
- Arunava Karmakar
- Dileep Kumar
Ramprasad Potluri
Telephone: +91-512-2597735
Email: This email address is being protected from spambots. You need JavaScript enabled to view it.
Location: Western Labs 217 B
- Details
- Last Updated: Friday, 02 May 2025 16:20
More information about the credits information and course template can be found here:
https://www.iitk.ac.in/doaa/data/Course-Template-B.Tech-BS.pdf
For any more clarifications, please contact
This email address is being protected from spambots. You need JavaScript enabled to view it.
- Details
- Last Updated: Thursday, 19 October 2023 10:47
More information about the credits information and course template can be found here:
https://www.iitk.ac.in/doaa/data/Course-Template-B.Tech-BS.pdf
For any more clarifications, please contact
This email address is being protected from spambots. You need JavaScript enabled to view it.
- Details
- Last Updated: Thursday, 19 October 2023 10:46
Department of Electrical Engineering, IIT Kanpur offers a four-year B.Tech. degree program.
For more details about the UG program, please refer to the UG manual here:
https://www.iitk.ac.in/doaa/data/UG-Manual.pdf
More information about the credits information and course template can be found here:
https://www.iitk.ac.in/doaa/data/Course-Template-B.Tech-BS.pdf
For any more clarifications, please contact
This email address is being protected from spambots. You need JavaScript enabled to view it.
- Details
- Last Updated: Thursday, 19 October 2023 10:38