
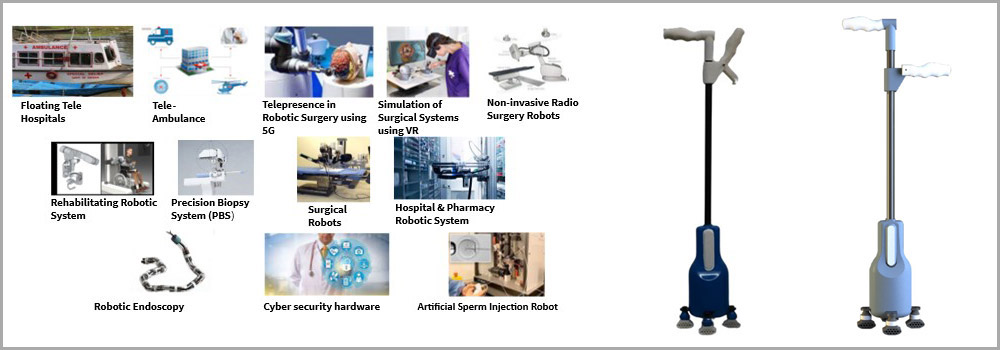


The COE of Telemedicine and Robotics is focused on developing systems and devices related to health care and rehabilitation, and support systems for telemedicine. In the area of medical robots, our immediate goal is to develop semi-autonomous and autonomous wheelchairs, bionic arms, and active cable-driven parallel robots for rehabilitation. In the area of telemedicine, the center is designing and developing products targeting access to health services for people living in resource-constrained environments.
Ongoing Research
- Smart-Stick- A standard walking stick helps to increase the Base of Support (BOS) for the user, which improves balance and stability when walking
- Cable-driven parallel robot
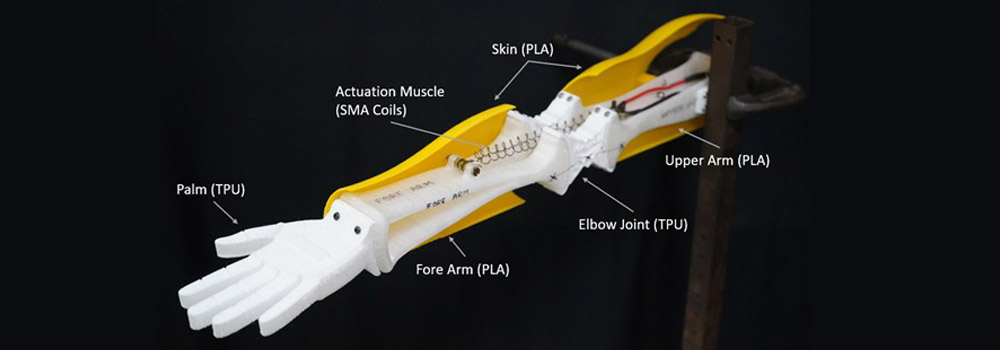
- Bionic arms play a crucial role in prosthetics and rehabilitation, offering mobility assistance to individuals with limb impairments.
- Autonomous Delivery robots, Autonomous logistics robots, and Autonomous Search and Rescue robots.
- Developing the 5G-based health care and professional education Models once the 5G Test Bed is in place
- Other research work in progress-
- Design & Development of Micro-Robots for Localized Drug Delivery
- Design & Development of Customized 3-D Printer for Manufacturing Tailored Prosthetics & Assistive Devices
- Hyperthermia using a microrobot
- Design & Development of Assistive Feeding Robot
- Development of Metamaterial-based Active Compliant Knee joint for Knee Orthoses (Collaboration with Kyushu Institute of Technology, Japan)
Flagship Project

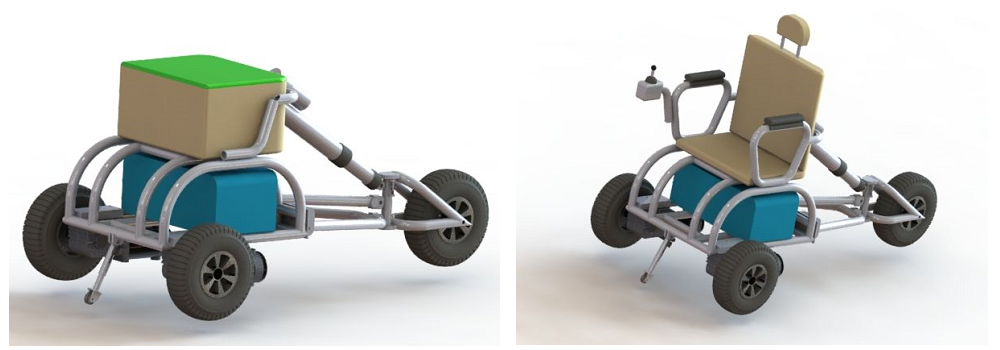
Design and Development of Autonomous Stairs/Escalator Climbing & Self-navigating Smart Wheelchair
The designing and developing of an autonomous wheelchair that can climb the escalators and self-navigate is in the testing phase. The smart wheelchair will have the following features:
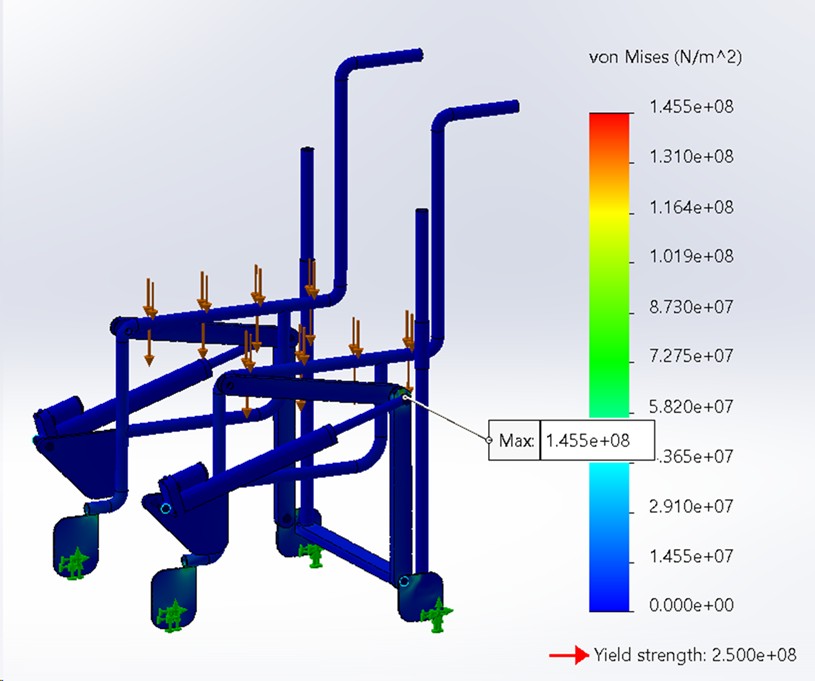
- Automated Slider crank system
- Dynamic Stability Control
- Deployable Origami Structure
- Visual serving-based navigation
- Simultaneous Localization and Mapping
The proposed prototype will also feature step/escalator climbing and the detection of falls. It will also have the SOS system, with secure data communication, autonomous navigation, continuous monitoring, and a touch-screen HMI.
This innovation will greatly help physically challenged people and older people to climb stairs and escalators.
PI
Name: Professor Bishakh Bhattacharya
Email: This email address is being protected from spambots. You need JavaScript enabled to view it.
Faculty Members

Dr. Bishakh Bhattacharya
Mechanical Engineering
Active and Passive Vibration Control Structural Health Management Energy Harvesting System Robotics & Automation Intelligent System Design Child- Robot Interaction

Dr. Soumya Ranjan Sahoo
Electrical Engineering
Nonlinear systems, Modelling, Control, Fault identification and Recovery in UAVs, Control of robot manipulators, Computer Vision and Neural Networks, Multi-agent system, Effect of time delay in systems – unmanned vehicles and power systems, Control Techniques for Microgrids (AC and DC) and power electronic converters
Associated Faculty Members
Dr. Abhilash Patel
Electrical Engineering
Dr. Ashutosh Modi
Computer Science and Engineering
Dr. D. K. Giri
Aerospace Engineering
Dr. Priyanka Bagade
Computer Science and Engineering
Dr. Satyaki Roy
Design
Dr. Twinkle Tripathy
Electrical Engineering
Research Fellows

Nayan Jyoti Baishya
ME
Research Interest: Robotics

Parikshit Saha
EE
Research Interest: Computer Vision and AI
Ruchira Kumar Pradhan
Cable-driven parallel robot for rehabilitation (PhD)
Malik Arsala Nissar
Bionic Arm (PhD)
Shambhavi Sabharwal
Bionic Arm (B-tech)
Kanhaiya Lal Chaurasiya
Bionic Arm (B-tech)
Shubham Chaurasia
Smart Wheelchair mechanical design(M-tech)
Mohd Tanveer Hasan
Smart Wheelchair Autonomous Navigation (M-tech)
Chaitanya Prabhu Doddaka
Smart Stick (B-tech)
Arnav Pandey
Smart Stick (B-tech)
Janees Haneef
Smart Stick (B-tech)
Vartika Narayani Srinet
Child Robot Interaction (PhD)
Clinical advisors
Dr. K Ganapathy
M Ch (Neurosurgery) Director
Apollo Telemedicine Networking Foundation & Apollo Tele Health Services, Chennai
Neurosurgery, stereotactic radiosurgery, Telemedicine

Dr. S.K.Mishra
Ex-Professor Department of Endocrine Surgery
Sanjay Gandhi Postgraduate Institute of Medical Sciences, Lucknow
Endocrine surgery, telemedicine

Dr. Hardeep Singh Malhotra
King George's Medical University Lucknow
Neurology Disorders Neuroradiology

Dr. Kuntal Kanti Das
Associate Professor Neurosurgery
Sanjay Gandhi Postgraduate Institute of Medical Sciences, Lucknow
Neurosurgical Oncology, Cranial Base Surgery, and Open Cerebrovascular Surgery

Dr. Akhilanand Chaurasia
Clinical Consultant and Researcher
King George's Medical University, Lucknow
Artificial Intelligence, Maxillofacial Radiology, Molecular Oral Oncology, Oral Medicine, Dental Education, Bioethics
Patents/Publications
- Tom Baby, Mahendra Kumar Gohil, Bishakh Bhattacharya, Autonomous Navigation of 4WIS4WID Agricultural Field Mobile Robot using Deep Reinforcement Learning, Dec 2024, https://doi.org/10.48550/arXiv.2412.18865.
- Arnav Pandey, Janees Haneef, Yashaswi Sinha, Kanhaiya Lal Chaurasiya, Bishakh Bhattacharya, Design and development of a shape memory alloy-powered rotary variable stiffness actuator embedded with an agonist-antagonist mechanism, May 2024, https://doi.org/10.1117/12.3010086.
- Tanuj Gupta, Vivek Gupta, Bishakh Bhattacharya, Tailoring of interface mode with actively controlled SMA spring, May 2024, https://doi.org/10.1117/12.3006487.
- Nayan Jyoti Baishya, Bishakh Bhattacharya, Design and Development of a Minimalistic Slider-Crank Mechanism Based Obstacle Overcoming Wheelchair, IITK Directions. (Under Review).
- Nayan Jyoti Baishya, Bishakh Bhattacharya, System for Controlling a Mobility Vehicle on an Escalator and Method Thereof, 08/12/2023, App. No. 202311060924.
Association/ Collaborations
